2020 – WEEK 1, team Rembrandts kick off
Seizoen 2020 is begonnen voor Team Rembrandts. Vanuit een compleet nieuwe bouwlocatie, Strijp-S in Eindhoven, begon team Rembrandts met de onthulling van de game van dit jaar. Het hele team was aanwezig om de spelregels en specificaties te zien en te horen, en wat een spannend spel is het: Infinite Recharge!
Onmiddellijk na de onthulling van de wedstrijd begon team Rembrandts het bouwseizoen. Apex Dynamics zal de voortgang zoveel mogelijk volgen en rapporteren op deze speciale Team Rembrandts-pagina.
Update time!
Hoewel het stil is geweest op de blog pagina van Delphi 4481-team-rembrandts, is het een drukke week geweest. We ontvingen onze onderdelen kit op woensdag met in totaal 5 powercells. Als internationaal team heb je het voorrecht om je aan te melden voor deze functie. FIRST heeft hierover in een vorige blog geschreven en doet het nu al een paar jaar en we bevelen het iedereen ten zeerste aan! U kunt de blog hier lezen, voor meer informatie zie blog 16.
Met 5 powercells konden we aan de slag met het belangrijkste subsysteem van de robot: opslag/serializer. Allemaal afhankelijk van de vereisten, maar inname lijkt redelijk uitvoerbaar, schieten is geen groot probleem, echter het systeem tussen de intake en de schiet-unit zal voor veel hoofdpijn bij de teams zorgen. (Ten minste iets waar we ons vanaf het begin zorgen over maakten 😉 )
Strategie & Robot Concept
We hebben nog geen definitieve beslissingen genomen maar denken aan een aantal algemene take-aways:
- Neem een brede intake en voer bal inname/uitgifte uit binnen de robot. (Voorkomen dat de powercells de inname beïnvloed)
- Probeer de ontwerpen te verwerken in een robot met een lage greppel, maar dit mag geen negatieve invloed hebben op de voortgang van het bouwen/ontwerpen.
- Bepaal onze week 1-strategie en robotconcept aan het einde van week 2.
Aan het einde van week 2 zullen we onze beslissingen en strategie voor week 1 indikken. Dit kan betekenen dat we niet prettig genoeg voelen om vanuit week 1 vanuit de greppel te schieten en een robot te bouwen die een snelle opname dichtbij een muur kan maken. Dit betekent niet dat we de “loopgraven” moeten opgeven, maar het zou een upgrade voor Detroit World Championship kunnen zijn. Misschien hebben we een werkende loopgravenschutter die goed genoeg is voor week 1 en kunnen we deze meenemen in het vliegtuig en monteren bij de regionale competitie!
Intake
We hebben in 3 dagen wat ballen zien vastlopen in sommige video’s van Robot, prototypes voor inname van mecanum, CD7-intakes. Dit leidt tot onze huidige gedachte van een over-de-bumper inlaat die even breed is als onze robotbreedte.
Meestal gebruiken we truck vinyl voor onze bumpers en omdat we de voorkeur geven boven de bumper, hebben we een test gedaan met ons bumpermateriaal versus de standaard andymark-stof.
4481 Bumper Materiaal:
Andymark Bumper Materiaal (gebruikt in 2013):
De afstand tussen de bumper en de inlaatwielen was vergelijkbaar in beide video’s en we voelden geen merkbaar verschil. Dit betekende dat we een prototype konden maken van onze eigen bot-sets die we hadden liggen.
Intake Concept 1
Intake Concept 1-2
Door een lineaire beweging springt een balk uit over de bumper met een plaat (mogelijk toegevoegde roller/wielen) bovenop voor de menselijke belasting.
Complexiteit is misschien lastig met dit concept, maar het heeft potentieel.
Intake Concept 2
We hoeven ons geen zorgen te maken over het centreren van de powercells, dit gaat soepel. Met een aantal rollen, wielen en misschien zelfs wat PVC zou het lukken.
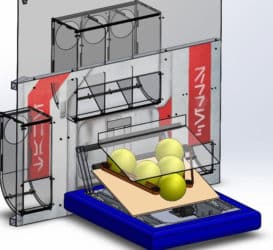
Intake Concept 3
Hier hebben we onze inname van 2016 gekannibaliseerd en meer verticaal gehouden.

Zoals je kunt zien zijn het twee rollen met oranje polycord ertussen, door hem verticaal te houden wilden we testen of de bal verticaal naar boven wordt verplaatst. Kortom om een vergelijkbare (geschaalde) intake te maken als team 125 gebruikte in 2017:
Het uiteindelijke ontwerp en verdere prototyping zijn afhankelijk van de ontwerpen voor opslag/uitgifte. Wordt vervolgd.
Opslag
De opslag moet de powercellen in serie geven aan de schiet-unit. Zoals je hebt gezien, zijn de powercells plakkerig en moeilijk om mee te werken, het zal moeilijk zijn om ze met een snelle, consistente snelheid in de schiet-unit te krijgen.
Storage Concept 1
Storage Concept 2
Dit kan een platte oplossing zijn voor het transporteren en verpakken van de powercells in de robot. het kan gevoelig zijn voor vastlopen bij hogere snelheden en totale inbouw in de robot kan moeilijk zijn omdat deze lang en breed is.
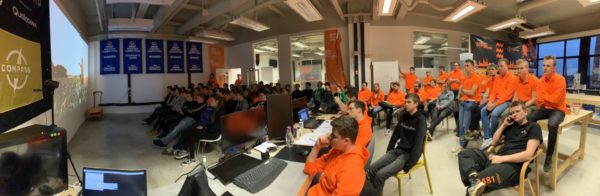
Opslag Concept 3
Dit idee was gebaseerd op het opslagsysteem van team #217 in 2006.
Dit wiel kan langzaam ronddraaien tijdens het innemen, zodat de powercells zich in de opslag verdelen. Daarom kijken we naar een intake in de stijl van team #125 in2017 om de ballen van de grond naar de bovenkant van de uitgifte te transporteren, ze zakken dan door de zwaartekracht naar beneden.
We gaan volgende week werken aan het bouwen van dit plaatwerk om een goede nieuwe testrun te doen op een aandrijving + intake.
Schiet-unit
(Nee, het wordt geen 12 neo shooter :smiley: !)
Aan CAD wordt nog steeds gewerkt, maar met deze shooter kunnen we meerdere functies testen:
Dit zijn Shooter-variabelen waarmee we kunnen variëren en testen:
- Snelheid / vermogen (kunnen we testen met de 775pro of Neo, 1 of 2)
- Compressie
- Verschillend verschillende wielendiameter (4 “en 6”)
- Vary different wheel widths
- Verschillende wielbreedtes variëren
- Toevoegen van een platte kap of geleiderails toe (+ ander soort materiaal)
- Hoek verticaal van het uitwerpen van de powercell
- Shooter zal kunnen worden gemonteerd op een begaanbare greppel-hoogte en 45 “hoogte
- Vliegwielkap opstelling versus tweezijdig shooter
We werken aan een uitgebreid testplan voor volgende week, dus we weten welke variabelencombinaties we moeten testen om de juiste ontwerpbeslissingen te nemen.
Klimmer
We hebben verschillende vergrendelingsmechanismen bekeken en kunnen met de schakelaar “rijden/bewegen”.
Dit was een test met onze robot van 2017.
Om dit uit te breiden hebben we een klein model gemaakt van een team #233-stijl lineaire arm. De mock-up was een geschaalde versie van de team #558 2016-stijl klimmer op hun concept.
Het zijn buizen die in elkaar schuiven, aangedreven door een lier en platte torsieveren. Door een pen/pneumatische cilinder los te laten, trekken de torsieveren de buizen eruit en kunnen we de robot omhoog lieren.
Drivetrain
Dit jaar hebben we ervoor gekozen om ons niet af te melden voor de AMoneforyou-drivebase. We gebruiken de aandrijflijn voor het testen van prototypen en eventueel oefenen met stuurprogramma’s. (Defensief spelen op onze eigen robot tijdens fietstraining)
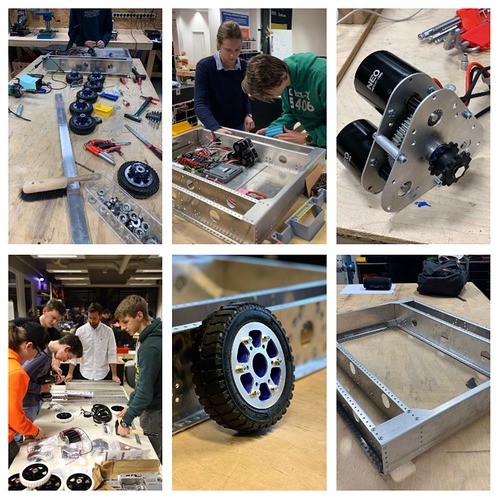
Naast de AM14U pakken we onze eigen aandrijflijn in. De naven kwamen netjes uit, 6 “WCP-banden met een 3D-geprinte hub en vlakke plaat. Assen en onderdelen zijn dit weekend gefabriceerd en de aandrijflijn zou morgen of woensdag in bedrijf moeten zijn.
Plan voor week 2
- Meer bnieuws posten :smiley:
- CAD van de shooter proto en opslag voor verdere testen
- Werken aan de intake welke de ballen kan transporteren naar de opslag
- Start van het ontwerpen van het klim mechanisme