2020 – WEEK 1, team Rembrandts kick off
Season 2020 has started for Team Rembrandts. From out of a complete new building location, Strijp-S in Eindhoven, team Rembrandts started with the reveal of this year’s game. The whole team was present to see and hear the game rules and specification, and what an exciting game it is: Infinite Recharge!
Immediately after the reveal of the game, team Rembrandts started the building season. Apex Dynamics will follow and report the progress as much as possible on this special Team Rembrandts page.
Update time!
Although we were a little quiet on chief delphi 4481-team-rembrandts page, it’s been a busy week. We received our kit of parts on Wednesday which carried 5 powercells in total. As an international team you have the privilege to opt-in for this feature. FIRST wrote about this in a previous blog and have been doing it for a couple years now and we’re highly recommending it to others! You can read the blog for more detailed information 16.
Having 5 powercells enabled us to start working on the most important subsystem of the robot: storage/serializer. All depending on your requirements but intaking seems rather doable, shooting won’t be a huge problem but the system in between the intake and shooter is what might cause a lot of headaches for teams. (At least something we were worried about from the beginning 😉 )
Strategy & Robot Concept
We haven’t made any permanent decisions yet.
We do have some general take-aways of what we’re currently thinking:
- Have a wide intake and do ball separation/serializing within the robot. (Preventing the powercells from rubbing together in your intake)
- Try packaging the designs in a low trench robot but it shouldn’t backfire the build/design progression.
- Decide on our week 1 strategy and robot concept at the end of week 2.
At the end of week 2 we’ll narrow down our decisions and strategy for week 1. This could mean we’re not comfortably enough with shooting from the trench for week 1 and build a robot that could do a rapid close by/wall shot only. This doesn’t mean we’ll give up on the trench shot but it could be a upgrade for Detroit World championship.
Maybe we’ll have a working trench shooter we’re comfortable enough before week 1 and we can take it with us on the plane and bolt it on at the regionals!
Intake
We’ve seen some ball jamming in some video’s of Robot in 3 days, mecanum intake prototypes, CD7 intakes. This leads to our current thought of an over-the-bumper intake which is as wide as our robot width.
Usually we use truck vinyl for our bumpers and since we prefer to intake over the bumper we did a test with our bumper material vs. the standard andymark fabric.
4481 Bumper Material:
Andymark Bumper Material (Used in 2013):
Distance between the bumper and intake wheels were similar in both videos and we didn’t feel any noticeable difference. This meant we could prototype on our own bumper sets we had laying around.
Intake Concept 1
Week 1 | Intake Concept 1 2
By a linear movement a 4 bar pops out over the bumper with a plate (possible added roller/wheels) on top for the human load.
Complexity might be a tricky one with this concept but it has potential.
Intake Concept 2
Not having to worry about centering the powercells within your intake is nice and “easy”. Rollers, wheels, maybe even some PVC would do the trick.
Intake Concept 3
Here we cannibalized our 2016 intake and held it more vertically.

As you can see it’s two rollers with orange polycord in between, by holding it vertically we wanted to test if the ball transfers up vertically.
Basically to create a similar (scaled) intake as 125 had in 2017:
Eventual design and further prototyping will be depending on the storage/serializer designs. To be continued.
Storage
The storage will have to serialize the powercells towards the shooter. As you’ve seen the powercells are sticky and difficult to work with, getting them into the shooter at a fast consistent rate will be difficult.
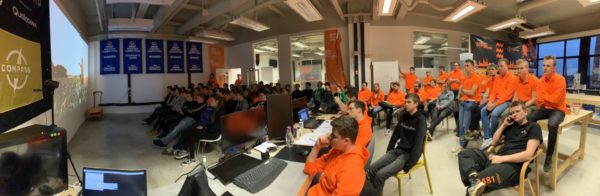
Storage Concept 1
 This idea was based on a video and prototype of #6135. The gap between the bottom rollers is greater then the diameter of the ball and the two belts are spinning opposite directions, the whole hopper is on a angle to the opening.
This idea was based on a video and prototype of #6135. The gap between the bottom rollers is greater then the diameter of the ball and the two belts are spinning opposite directions, the whole hopper is on a angle to the opening.
Looks promising and easy; feed consistency is little unpredictable.
Storage Concept 2
This could be a flat solution of transporting and packaging your powercells in the robot. Could be sensitive for jamming at higher speeds and total packaging in the robot might be difficult since it’s long and wide.
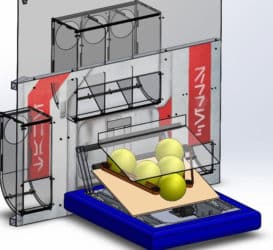
Storage Concept 3
This idea was based on the storage system of #217 in 2006.
This wheel could be spinning slowly while intaking so the powercells divide among the pockets. Hence we’re looking at a 125 – 2017 style intake to transport the balls from the ground to the top of the serializer so they can fall in by gravity.
We’ll be working on building this from sheetmetal next week to do a proper new test run on a drivetrain + intake.
Shooter
 The shooter prototypes we’ve build are shooting similar as other teams have posted videos of. We’ve decided to design a modular test shooter on which we can properly test and gather data.
The shooter prototypes we’ve build are shooting similar as other teams have posted videos of. We’ve decided to design a modular test shooter on which we can properly test and gather data.
(No it won’t be a 12 neo shooter :smiley: !)
CAD is still being worked on but with this shooter we’re able to test multiple features:
Shooter variables which we can vary and test with:
- Speed/power (Can test with 775pro or Neo, 1 or 2)
- Compression
- Vary different wheels diameter (4″ and 6″)
- Vary different wheel widths
- Different type of wheels/material
- Add a flat hood or guide rails (+ different type of materials)
- Angle vertical of ejecting the powercell
- Shooter will be able to be mounted at a passable-trench-height and 45″ height
- Flywheel hood set-up vs. two sided shooter
We’ll be working on a extensive test plan for next week so we know what variables combinations we need to test to make proper design decisions.
Climber
We’ve been looking at different locking mechanisms and being able to “drive/move” on the switch.
This was a test with our 2017 robot.
For extending we made a small mock up of a #233 style linear-stage-arm. The mock up was a scaled version of the #558 2016 style climber on their re-build at worlds.
It’s tubes that slide in to each other, powered by a winch and flat torsion springs. By releasing a pin/pneumatic cilinder the torsion springs will pull out the tubes and we can winch the robot up.
Drivetrain
This year we’ve chosen to not opt-out for the AMoneforyou drivebase. We’ll be using the drivetrain for prototype testing and eventual driver practice. (Defensive play on our own robot during cycle practice)
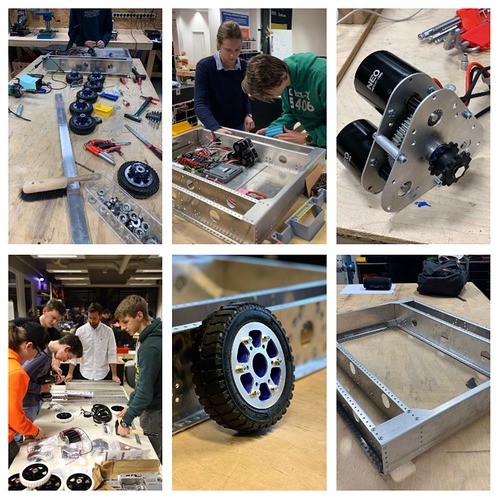
Besides the AM14U we’re wrapping up our own drivetrain. The hubs came out neatly, 6″ WCP tires with a 3D printed hub and flat sheetmal. Shafts and parts have been manufactured this weekend and the drivetrain should be up and running tomorrow or Wednesday.
Plan for week 2
- Post more often :smiley:
- CAD the shooter proto and storage to do further testing
- Work on a intake that can transport balls to the storage
- Start designing a climbing mechanism